
在室外移动机器人的应用场景中,精确的定位能力不仅构成了其自主导航的核心,而且对于确保其操作的安全性和可靠性至关重要。当前,室外高精度定位技术的两大主流方案分别是3D激光同时定位与地图构建(SLAM)和全球导航卫星系统实时动态定位(GNSS RTK)。然而,依赖单一传感器的定位系统往往会因环境条件的变化和信号干扰而受到限制,这种局限性在面对日益增长的复杂应用需求时显得尤为明显,难以满足广泛的使用场景。因此,为了实现更为稳健和可靠的室外定位,探索多传感器融合技术成为了行业发展的新趋势。
3D激光雷达定位方案
在室内或有一定环境特征的室外,可以获得高精度、高鲁棒性的定位。但在空旷的室外,缺乏环境特征,难以精确地定位。
GNSS RTK 定位方案
在空旷室外环境下,可以获得有效的定位,且具有全局一致性,没有积累误差。但在室外高楼遮挡的地方无法获得持续、准确的定位信息。
在集成IMU和轮速计等传感器的基础上,科聪推出3D激光SLAM与GNSS RTK融合定位方案,通过两种技术的优势互补,极大提升了定位精度和定位稳定性。
科聪融合定位方案
KC Integrated Positioning Solution
关键技术挑战
坐标转换难题:3D激光SLAM采用的是局部坐标系统,GNSS采用是全局坐标系统,实现定位数据融合的前提是建立两者坐标系之间的转换关系,由于两者传感器数据均存在一定测量误差和测量时滞,因此精确计算其坐标系转换复杂性高。
回环匹配困难:空旷室外场景下,GNSS信号缺乏精确的高程信息使得准确三维回环匹配实施难度大。
科聪应对策略
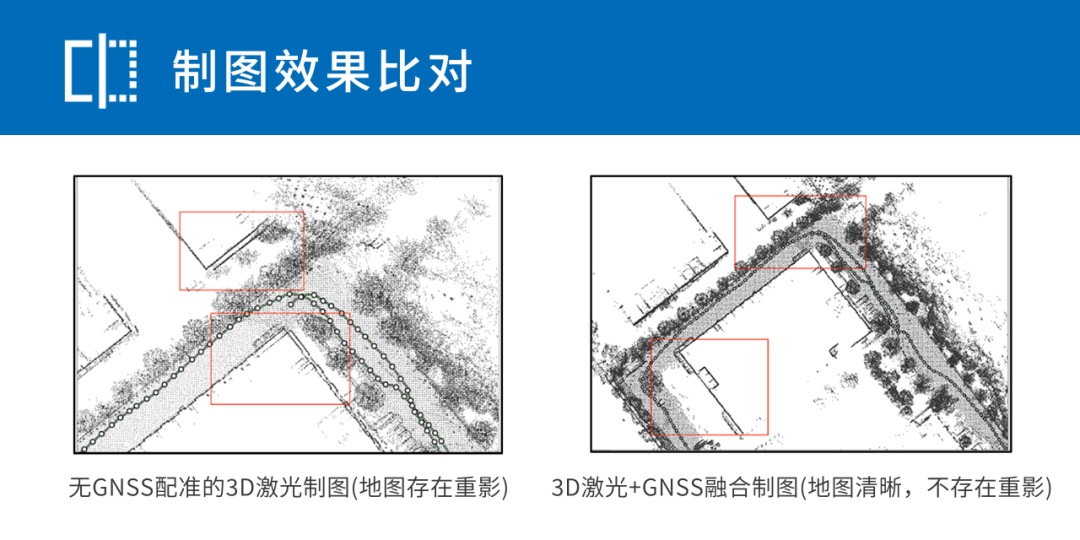
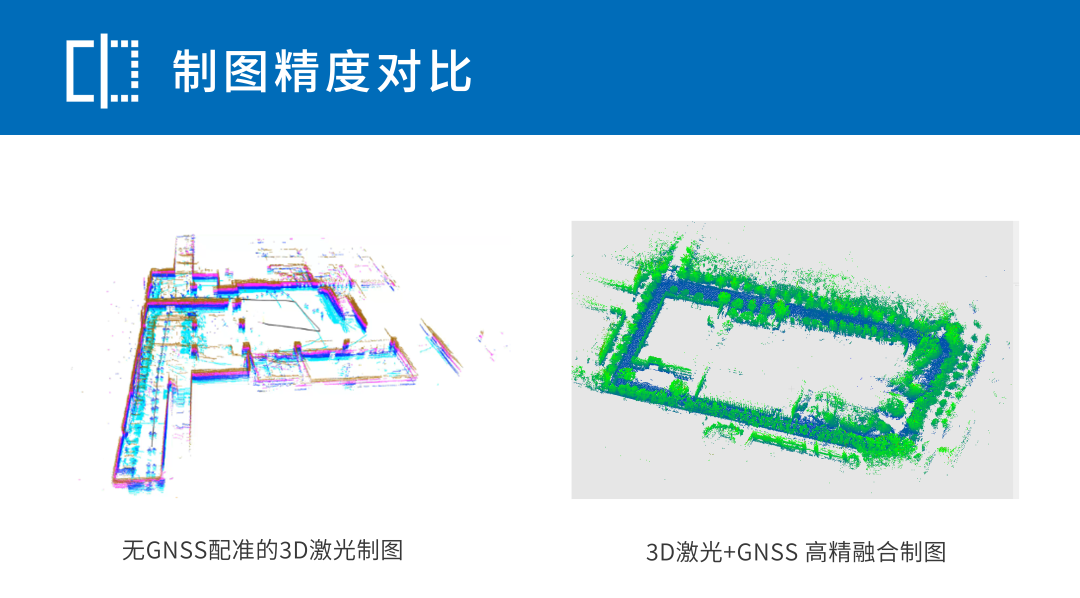
在制图阶段,使用部分GNSS数据和激光定位数据计算原点数值。随后不断地将激光数据和GNSS数据与已有的地图进行配准,将配准结果加入到非线性优化模型中,推导模型的损失函数(Loss Function),在一定约束内寻找最小值,完成最优处理,得到3D激光SLAM和GNSS RTK融合地图。
定位过程中,根据获取到的激光数据或GNSS定位位姿,与已创建好的地图进行对比匹配。与传统的3D激光定位技术相比,科聪的融合定位方案在空旷环境中表现出色,将定位精度从±5cm显著提升至±1cm。并且使机器人在5毫秒至10毫秒内,迅速获得实时且精确的定位信息。
通过无切换耦合、全局一致性等特性,科聪的融合定位方案显著提升了室外定位表现。无论是在何种复杂环境中,该方案都能够保证高精度定位输出。

浙江科聪是国内领先的机器人核心控制系统和整体解决方案提供商。公司成立于2015年,位于美丽杭州的钱塘江畔。公司致力于为客户提供国际一流的机器人技术、产品和解决方案。公司产品广泛应用于无人巡检、仓储、物流、安保巡逻、清洁、工程车辆、农业机械等众多领域。
公司技术实力强劲,拥有移动机器人全方位技术研发、产品化和工程化能力,覆盖机器人技术相关机械、电路、软件、算法、电气、整机集成交叉学科全领域。核心团队成员均为从业10年以上的机器人、自动化和人工智能行业技术专家。公司依托浙江大学、清华大学和中国科技大学等国内高校平台,并在国际范围内与美国卡耐基梅隆大学、德国德累斯顿大学、慕尼黑工业大学、美国硅谷的人工智能技术团队达成了伙伴合作关系。公司已掌握智能移动机器人基于多传感器融合的环境学习与精确定位技术、动态路径规划与精确轨迹跟踪技术、移动机器人多驱运动控制技术、基于深度学习与智能云的数据挖掘技术、多智体分布式协作技术、特种环境防护技术与本质安全防爆技术等一系列国内领先国际一流技术。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号