协作式自主分布式机器人探索(CADRE)机器人概念的计算机辅助设计。
美国宇航局(NASA)的合作自主分布式机器人探索(CADRE)项目正在开发一个鞋盒大小的移动机器人网络,未来可以实现对月球、火星等的自主机器人探索。CADRE机器人是NASA的A-PUFFER技术的最新版本。每个机器人都包含一台带有无线无线电的机载计算机,用于通信,还有一台立体相机--它有多个镜头和图像传感器--用于感知前方环境并捕捉3D图像。美国宇航局位于南加州的喷气推进实验室正在开发这种机器人侦察机,设计它们作为一个团体进行探索,并在月球上的陨石坑和洞穴等难以到达的地方收集数据。
资助该项目的NASA "游戏改变发展计划 "项目要素经理Sonny Mitchell说:
"CADRE机器人可以补充NASA的大型行星机器人和漫游车。多个小型自主机器人可以覆盖更多的地面,有可能帮助我们绘制月球上未开发的区域。"
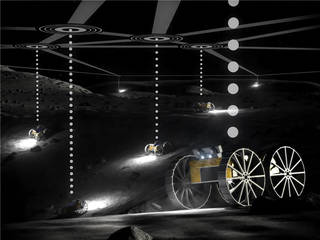
CADRE机器人的图形可视化通过无线通信网络一起工作,以探索月球表面。
CADRE机器人如何工作?
在发射和太空旅行期间,机器人将以紧凑的姿势存放在一个较大的着陆器中。一旦着陆器到达目的地,CADRE侦察机将弹射到地面。探险者被设计得足够敏捷和聪明,能够独立探索月球上的极端地形,而不被地球上的宇航员或工程师控制。
对于VIPER这样的月球任务来说,打电话回家是一个可行的选择,因为通信信号可以在几秒钟内到达地球。不过,等待地面控制部门审查传输信号,决定下一步,并发回更新或命令,还是会消耗宝贵的时间。而对于距离地球更远的目的地,比如火星和木星的卫星欧罗巴,通信时间可能会更长,使得地面传输变得乏味。让机器人协同工作,自主探索,将大大提高任务的科学回报率。
CADRE团队正在研究机器人与基站(连接到月球着陆器上)之间的多种通信方式,包括基于WiFi的系统。在这种情况下,机器人之间会相互通信,一起分享信息,并将这些信息传回着陆器上的基站。然后,基站将所有集体数据重新分配出去,传回给巡视器。
JPL项目经理Matthew Frost表示:

合作式自主分布式机器人探索(CADRE)的前身,即自动弹出式扁平折叠探索者机器人或A-PUFFERs,在NASA喷气推进实验室中探索火星场。
"Frost称这为'高脑',这就需要基站电脑将所有机器人的集体信息,比如地图,放在一起,然后将更详细的信息和编制的地图发送给机器人。有许多领域可以产生极大的影响。通过提高多代理系统的自主性,我们将减少巡视器必须'打电话回家'以获得地面控制指令的次数。"
CADRE团队专注于将这种自主性技术用于小型机器人,但该平台可以扩展到包括大型机器人、基站和其他地面系统。
智慧探月新天地
CADRE机器人可以派上用场的一个特殊领域是月球熔岩管附近的探索。在这些地区,表面表层凝固,但下面仍有熔岩流动,从而形成洞穴。通过多试剂(或多个机器人共同工作),将一个小型机器人送入熔岩管是可能的,尽管它能否返回地表具有不确定性。只要多Agent、机器人和巡视器之间有良好的信号范围,那么就可以将数据传回月球表面的那些机器人,沟通一些从未见过的数据。
多个机器人之间的知识共享可以是简单的,比如共享位置和地图知识,以改善它们的路径规划和科学目标的位置。然而,它也可以通过共享科学传感器数据,开启科学探索的新天地。例如,通过使用带有探地雷达的多代理系统,来自不同巡视器的数据可以用来调整它们之间的基线,使系统能够创建不同深度的地下地图。装备有望远镜的CADRE多代理可以被安排成一个合成孔径,因此可以作为一个望远镜。同样,装备有传感器的多个巡视器可以分散开来,以便更好地了解地表以下的月球地震状况。
CADRE的下一步计划是什么?
该团队将继续通过地面测试和使用月球地形模拟剂的演示来推进这项自主机器人技术。这将包括测试多个小型机器人共同探索一个区域的能力,同时每个机器人执行各种任务,如测绘、地下成像和记录地面运动。正在考虑将CADRE作为商业月球着陆器的有效载荷在月球上进行技术演示。
Frost希望CADRE系统能够成为一种标准的、商业化的现成选择,实现太空探索的新财富。总体目标是在未来几年内实现探索太空的新方式。
2025-10-11 11:47
2025-10-11 11:42
2025-10-11 11:24
2025-10-11 11:22
2025-10-10 09:52
2025-10-10 09:38
2025-10-10 09:34
2025-09-28 09:57
2025-09-25 14:00
2025-09-21 08:58





















 粤公网安备 44010602004352号
粤公网安备 44010602004352号