该车型具有机构简单,工作可靠,成本低。在自动运行状态下小车能做前进,后退行驶并能垂直转弯机动性好。和舵轮驱动的四轮行走机构小车比例,该型号由于省去了舵轮,除了可以节省空间,小车可以做...
![苏州睿斯博特机器人有限公司]()
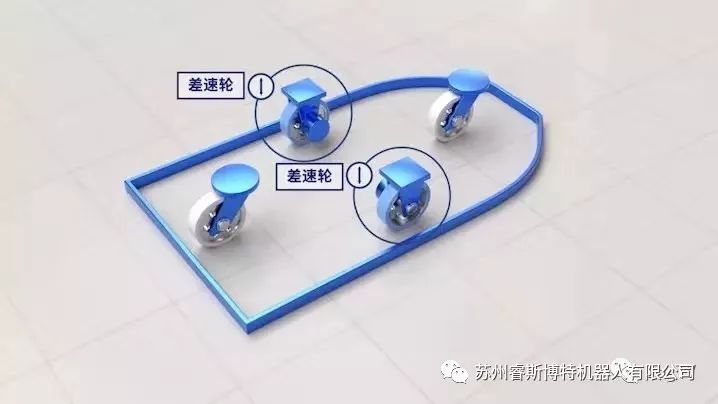
该车型具有机构简单,工作可靠,成本低。在自动运行状态下小车能做前进,后退行驶并能垂直转弯机动性好。和舵轮驱动的四轮行走机构小车比例,该型号由于省去了舵轮,除了可以节省空间,小车可以做的更小的些,因此常见于潜伏式AGV / AGC,是目前市面上应用最广的的AGV模型。
![]()
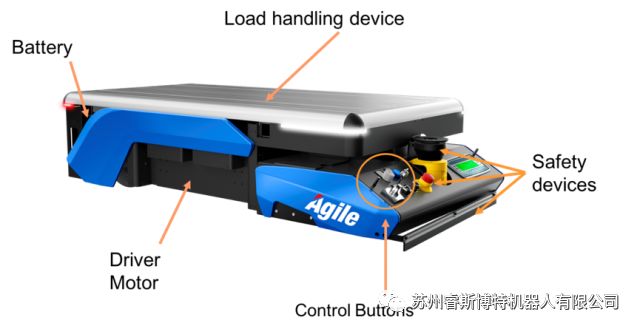
一般来说,AGV 主要由安全装置(急停按纽,激光雷达,安全PLC,安全速度模块),控制装置,负载搬运装置,驱动装置,电池和电机等组成。其中,控制方面,包括功能控制(如指令解析,无线通信,导航数据处理,图像处理等),动力控制(如电源,充电控制等),安全控制(如障碍物检测,速度和转向控制等)。
![]()
比较国际上比较通用的标准有:
EN ISO 13849 -1:2015机械安全-控制系统的安全相关部件第一部分:设计通则
EN 1175-1工业车辆的安全-电气要求-电池驱动的车辆的通用要求
EN 1525工业车辆的安全-无人驾驶车辆及其系统(未来可能会被EN ISO 3691-4替代)
除了以上标准,德国有VDI 2510,美国有UL3100,中国有CR等标准要求。
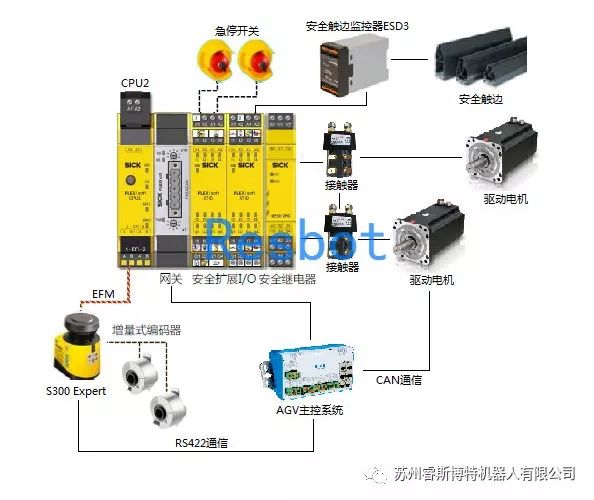
在AGV模型设计的时候,常见的安全防护功能有急停按钮,安全扫描仪,安全触边等等,虽然这些在进行AGV安全防护配置时比较容易会想到。但是在实际做出来的系统,还是不能满足安全标准的要求。以下有一个简单的提示,以SICK的系统为例,做一个简单的介绍。
![]()















 粤公网安备 44010602004352号
粤公网安备 44010602004352号