伴随移动机器人(AGV)产业快速发展,激光导航移动机器人以其自主、灵活、高效、精准的优势成为市场上最受欢迎的移动机器人产品,并在工业制造、医疗教育、商用服务等诸多领域广泛应用。在移动互联网及各大新媒体平台的作用下,激光导航移动机器人产品逐渐走进大众视野,成为人们生活中的屡见不鲜的“新物种”。但是对绝大多数的普通大众而言,激光导航移动机器人是如何工作的,好似成为了新的世界未解之谜,让大家百思不得其解。
今天,小仙就带大家来揭开这个“未解之谜”。
激光导航移动机器人要想完成作业任务,首先得解决这三个基本问题:“我在哪儿?”、“我要到哪里去?”、“我应该怎样去?”。而要解决这三个问题就需要对移动机器人进行定位、建立地图及路径规划。只有解决了这三个问题才能实现移动机器人的自主导航,完成一系列的运输工作。

这时需要提及的是SLAM技术,SLAM意为即时定位与地图构建。它解决的就是移动机器人在未知环境中如何进行自主导航的问题。激光导航移动机器人采用的是激光SLAM技术,工作原理是通过激光雷达对周围环境进行信息采集,呈现出一系列分散的、具有准确角度和距离信息的点,被称为点云。

密密麻麻的点云信息集合起来就会形成一张地图,把这张地图存储在移动机器人中,当移动机器人在运行时通过实时的点云信息与存储的地图进行匹配与对比,计算激光雷达相对运动的距离和姿态的改变,也就完成了对机器人自身的定位。这时就解决了“我在哪儿?”的问题。
当完成地图构建与机器人定位之后,解决“我要到哪里去”的问题就会变得相对简单。在地图中设定一个目标位置,并把目标位置告诉移动机器人,移动机器人便可以明确“我要到哪里去”。
相对较难的是“我应该怎样去”的问题,因为在去到目标位置过程中,一方面是路径规划与路径选择,如何才能找到到达目标位置的最优路径;一方面是去往目标位置过程中可能会遇到各种各样的障碍,即自主导航及自主避障。而且,在移动机器人去往目标位置时可能会由于定位丢失或其它因素导致无法精确到达指定位置。这一系列问题的背后,都与移动机器人的算法紧密相连。掌握了最为核心的算法之后,“我应该怎样去”的问题就会变得简单起来。
从导航算法来看,由于激光导航移动机器人又分为激光反光板导航与激光自然轮廓导航两种,它们的算法也不一样。
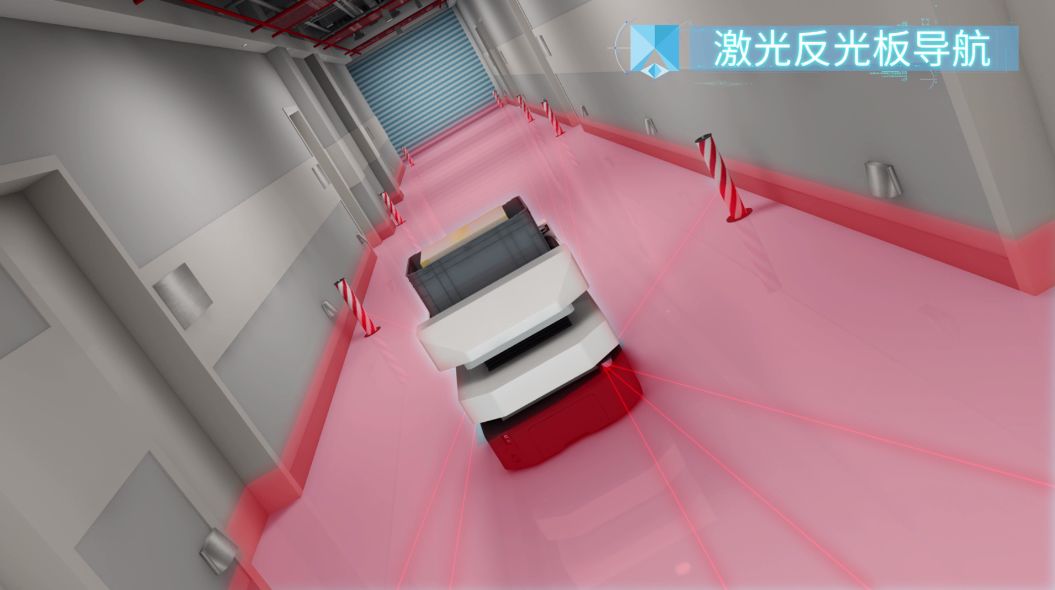
激光反光板导航通过激光雷达持续地发射激光脉冲,由旋转机构将激光脉冲按一定角度间隔(角度分辨率)发射向扫描角度内的各个方向而形成一个以径向坐标为基准的二维扫描面。激光雷达通过识别扫描范围内的物体表面反射率,来识别激光反光板的位置信息,再通过最少三个反光板的位置计算出激光雷达所在的AGV的位置和姿态信息。
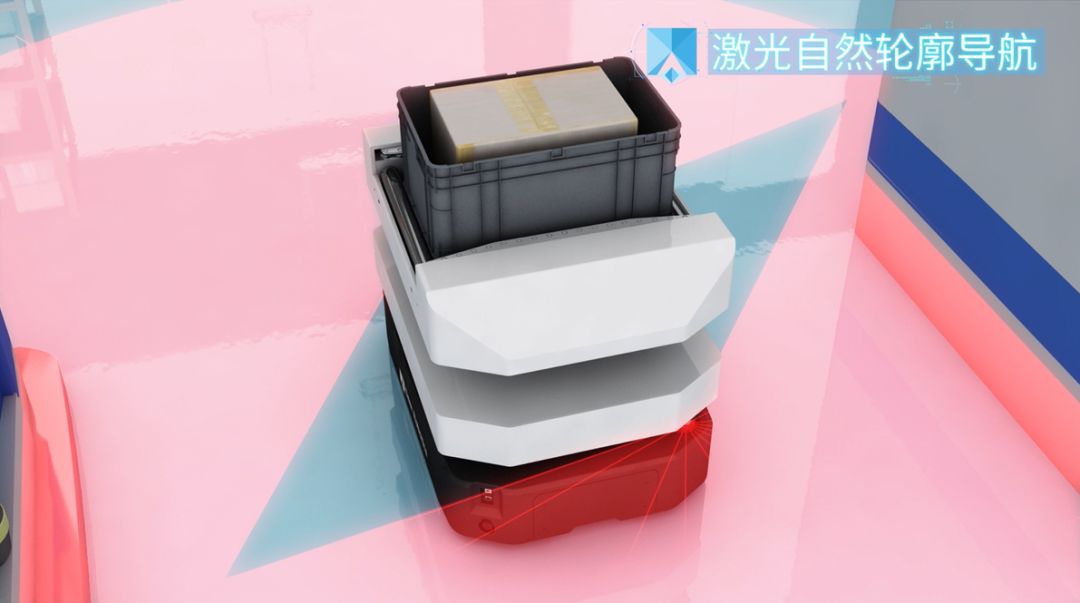
而激光自然轮廓导航则是通过激光扫描仪对自然环境(如墙壁、柱子或其它固定物体)进行测量、学习,结合自身所携带的内部传感器(编码器、IMU等)和外部传感器(激光传感器)来对自身进行定位。它的算法会融合激光、编码器、陀螺仪等多种传感器的数据来进行计算。
而在解决了“我在哪儿?”、“我要到哪里去?”、“我应该怎样去?”这三个基本问题之后,相信大家对移动机器人是如何工作的便有了答案。
最后值得一提的是,在实际应用场景中,假如网络环境状况不佳,地面不平整、有坑洞,移动机器人行径路线有行人等不可预见的障碍,也会对移动机器人安全顺利的完成工作产生一定的阻碍。这时便需要多种方式来确保移动机器人安全运行。
作为一站式移动机器人方案专家,面对各种复杂场景,仙知机器人都有不同的解决方案。如移动机器人在多个AP的现场环境中运行,仙知解决方案可通过选配Wi-Fi漫游功能来确保网络稳定性;如地面有坑洞,可选配3D相机进行识别检测,根据配置选择停障或绕行;如车间有流动的工人,可使用双激光移动机器人、碰撞条等多种防范措施确保机器人安全运行。















 粤公网安备 44010602004352号
粤公网安备 44010602004352号