AGV是移动机器人的一个重要分支,具有并行作业、自动化、智能化和柔性化等优势,如今已广泛应用于自动化仓储系统、智能工厂、智能生产等领域。

1953年,美国Basrrett电子公司开发成功了世界第一台自主导航车(AGV),它由一辆牵引式拖拉机改造而成,带有车兜,在一间杂货仓库中沿着布置在空中的导线运输货物,并具有一个以真空管技术为基础的控制器。此后,随着计算机、微处理器、控制系统及视觉识别等技术的发展,AGV的导航方式也在不断创新与演进之中。

图源:promat
AGV,全称为Automated Guided Vehicle,意即自动导引运输车。我国国家标准《物流术语》,将AGV定义为具有自动导引装置,能够沿设定的路径行驰,在车体上具有编程和停车选择装置、安全保护装置以及各种物料移载功能的搬运车辆。AGV是移动机器人的一个重要分支,具有并行作业、自动化、智能化和柔性化等优势,如今已广泛应用于自动化仓储系统、智能工厂、智能生产等领域。
有关AGV的导航方式
01
AGV及其导航方式的演变与进化
回顾AGV及其导航方式的发展历史,大致可分为三个发展阶段:
01
第一阶段:固定路径的电磁导引
AGV技术虽然起源于美国,但在随后的三十年里在欧洲发展较快。从1954年英国首次采用地下埋线的电磁感应导引技术起,早期的AGV基本都采用电磁导引方式,即AGV沿着地面上的信号行驶,AGV上的传感器根据信号的强度,选择某一频率的电磁信号为AGV提供导引。
在这一阶段,由于计算机技术发展并应用到AGV系统的管理和控制中,AGV的应用场景也从早期的多局限于仓库内用作货物转运,扩展到用于仓库自动化和工厂作业中,并作为生产组成部分进入生产系统,用于柔性生产线和汽车装配线中。
02
第二阶段:无线式导引技术得到应用
20世纪80年代,欧洲的AGV浪潮涌入美国。许多美国公司通过技术引进和合资经营等手段将欧洲先进的AGV技术转移到美国。由于计算机微处理器的发展、控制技术的兴起,计算机通讯、识别技术等进入AGV研究领域,AGV向着智能化方向发展,无线式导引技术(比如激光导航、惯性导航等)则被引入到AGV系统中,大大提高了AGV的灵活性和准确性。
80年代末到90年代初,AGV导引技术出现井喷式发展。比较典型的有瑞典NDC公司的激光导航式AGV,荷兰的磁体网络导引式AGV、比利时Egemin公司的激光导航与惯性导航、激光测角与测距相结合的复合导航式AGV等。
03
第三阶段:百花齐放,多种导航导引方式并存
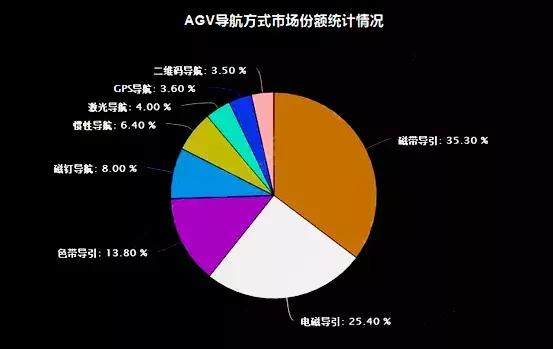
AGV导航方式市场份额统计情况
(图源:前瞻产业研究院)
当前正处于AGV导航方式发展的第三阶段,即“百花齐放”,多种导航导引方式并存。一方面,传统导引方式仍在广泛使用,根据前瞻产业研究院2018年整理数据,磁导引、磁带导引、色带导引仍占据着AGV导航方式共74.5%的市场份额。另一方面,二维码导航、激光导航、惯性导航、GPS导航等也都应用到AGV系统中,且AGV导航技术也在持续创新,视觉导航、自然导航、荧光导航等都具有良好的应用前景。此外,随着市场需求的不断变化,未来也必将有更多的导航方式出现。
可以说AGV的技术发展史,也就是AGV导航导引方式的演进史。随着技术的变革与应用,AGV导航方式也从最初的固定路径导引(电磁导引),发展到半固定路径导引(磁导引和光带导引),再发展到自由路径导引(如基于“灯塔”信息的激光导航、GPS导航,基于地标信息的惯性导航、标签导航,基于环境信息的环境导航或自然导航等)。随着导航技术的发展,AGV对特定标志物的依赖逐渐较少,对环境的适应性则逐渐增强。
02
9种主流导航方式特点分析
AGV的导航是指其决定AGV运行方向和路径的方法。目前常用的AGV导航导引方式主要有磁导引、电磁导引、光带导引、惯性导航、激光导航、视觉导航、二维码导航、直接坐标导航、GPS导航等9种导航方式。
① 磁导引
磁导引又分为磁带导引、磁点(磁钉)等导引方式,也即在AGV的行驶路径上贴磁带或打磁点(磁钉),通过磁感应信号实现导引。目前,磁带、磁点(磁钉)导引技术比较成熟,应用也较为广泛。
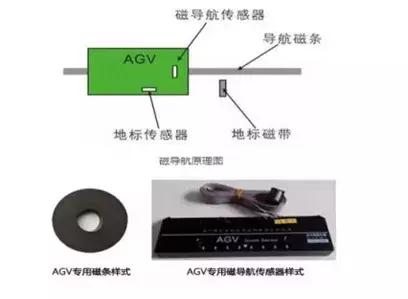
磁导引原理图
其优点是改变或扩充路径较容易,磁带、磁点的安装简单;缺点则是易受AGV行走路径周围的金属物质的干扰。此外,由于磁带外露,容易受到机械损伤和污染,导航的稳定性受环境影响较大,因此近年来此类AGV较多采用磁点(磁钉)方式。
② 电磁导引
该导引方式的基本工作原理为:在AGV的行驶路径上埋设金属导线,并加载低频、低压电流,使导线周围产生磁场,AGV上的感应线圈通过对导航磁场强弱的识别和跟踪,实现AGV的导引。
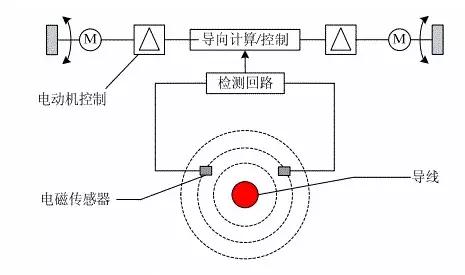
电磁感应导引结构图
其优点为引线隐蔽,不易污染和破损,导引原理简单可靠,便于控制和通讯,无声光干扰,制造成本较低;缺点则为路径更改的灵活性差,调整变动麻烦,感应线圈对周围的铁磁物质较敏感。在国外,对于一些路线比较简单、需要24小时连续作业的工况(比如发动机等装配生产线),基于非接触供电技术的电磁导引AGV应用是比较多见的。
③ 光学导引
该导引方式的基本工作原理为:在AGV的行驶路径上涂漆或粘贴色带,通过对光学传感器采入的色带图像信号进行识别实现导引。此外,用CCD摄像机和图像处理系统替代普通的光学传感器可以有效提高导引系统的可靠性。目前,光学导引技术成熟,应用也较为广泛。
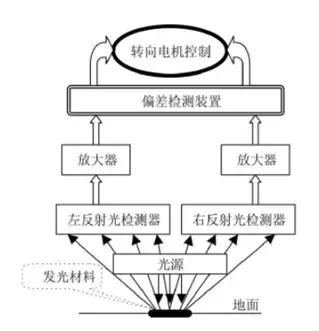
光学导引原理
光学导引与磁带导引比较类似,主要优点为灵活性较好,地面路线设置十分简单;缺点则是易受色带污染和磨损的影响,对环境要求较高,导引可靠性受制于地面条件,停位精度比较低。
④ 激光导航
最初的激光导航需要反射板来做辅助,称为反射板激光导航模式,即在AGV行驶路径的周围安装位置精确的激光反射板,AGV通过发射激光束,同时采集由反射板反射的激光束,来确定其当前的位置和方向,并通过连续的三角几何运算来实现AGV的导航。依据同样的导航原理,若将激光扫描器更换为红外发射器或超声波发射器,则反光板激光导航可以变为红外导航或超声波导航。
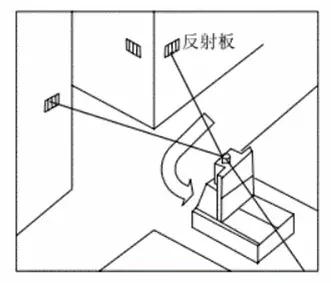
反射板激光导航示意图
激光导航的主要优点为定位精确,能适应复杂的路径条件及工作环境,能快速变更行驶路径和修改运行参数;主要缺点则为激光定位装置成本较高。对环境要求(如外界光线、地面要求、能见度要求等)相对较高,不适合室外(尤其是易受雨、雪、雾的影响)应用。
目前,基于SLAM(Simultaneouslocalization and mapping,同步定位与地图创建)技术的无反射板激光导航,由于突破了诸多局限,实现了AGV在复杂环境下也能精准定位、快速部署而备受关注,成为许多AGV厂商的研发方向。
⑤ 惯性导航
惯性导航,即在AGV上安装陀螺仪,在行驶区域的地面上安装定位块,AGV通过对陀螺仪偏差信号(角速率)的计算及地面定位块信号的采集来确定自身的位置和方向,从而实现AGV的自动导引。
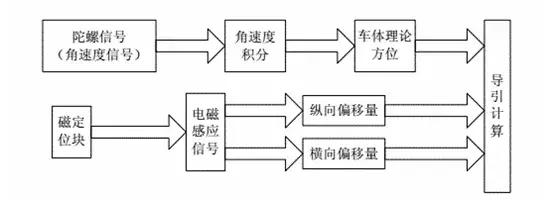
惯性导航原理图
惯性导航作为AGV领域新兴的导航方式,在军方较早运用。其优点是技术先进,定位精准,地面处理工作量小,路径灵活性强。缺点则是制造成本较高,导航的精度和可靠性与陀螺仪的制造精度及其后续信号处理密切相关。
⑥ 视觉导航
AGV领域的视觉导航,是指以摄像头获取可见光信号,基于模拟视觉的导航系统,也即在AGV上安装CCD摄像机和传感器,AGV在行驶过程中通过视觉传感器采集图像信息,并通过对图像信息的处理确定AGV的当前位置(识别给定路标)。

美国SEEGIRD公司的视觉导航AGV
(图片来源于SEEGIRD官网)
视觉导航方式不需要人为设置任何物理路径,具有路线设置灵活,适用范围广,成本低,允许无固定参照物等优点,理论上具有最佳导航柔性,也是未来的发展方向。但是,由于基于无固定参照的视觉导航AGV其定位精度往往不高,利用车载视觉系统快速、准确地实现路标识别这一技术瓶颈尚未得到突破。
⑦ 二维码导航
二维码导航实际上也属于视觉识别类导航,且与磁钉导引较为相似,只是坐标标志物不同,前者是磁钉,后者是二维码。其原理是AGV通过摄像头扫描地面QR二维码,通过解析二维码信息获取当前的位置信息。二维码导航通常与惯性导航相结合,以实现精准定位。

嘉腾二维码导航AGV
(图片来源于嘉腾机器人官网)
二维码导航比磁导航定位精确,在铺设、改变路径上也较容易,便于控制,对声光无干扰。缺点则是路径需要定期维护,在项目现场需要铺设大量二维码,且二维码易磨损,比较适合全自动无人化环境。
⑧ 直接坐标导航
直接坐标导航,即用定位块将AGV的行驶区域分成若干坐标小区域,通过对小区域的计数实现导引,一般有光电式(将坐标小区域以两种颜色划分,通过光电器件计数)和电磁式(将坐标小区域以金属块或磁块划分,通过电磁感应器件计数)两种形式。
其优点是可以实现路径的修改,导引可靠性好,对环境无特别要求。缺点是地面测量安装复杂,工作量大,导引精度和定位精度较低,且无法满足复杂路径的要求。
⑨ GPS导航
GPS(Global Positioning System,全球定位系统)导航,即通过卫星对非固定路面系统中的控制对象进行跟踪和制导,其精度取决于卫星在空中的固定精度和数量,以及控制对象周围环境等因素。
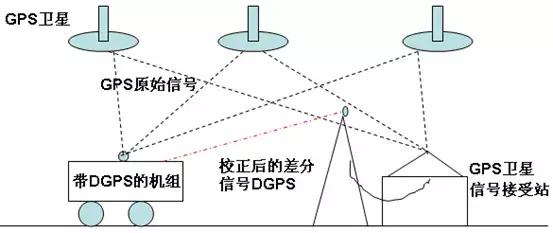
dGPS导航原理
因GPS定位系统用于AGV定位时存在近距离定位精度低等问题,由此也衍生出iGPS(室内GPS)和dGPS(用于室外的差分GPS)导航系统,其精度要远远高于民用GPS。目前应用于AGV上的GPS导航技术还在发展和完善之中。
03
AGV导航方式的创新并未止步
虽然目前应用于AGV上的导航导引方式多种多样,且各有优缺点,适用于不同的应用场景。但面对激烈的市场竞争以及电商、制造等行业对智慧物流更强烈的市场需求,目前对AGV导航方式的探索与技术创新却并未止步,比较典型的包括自然导航、荧光导航等。
① 自然导航
自然导航,是基于SLAM技术以及现有环境实现,不需要对基础设施进行任何调整,无需地面标记的导航方式。由于其不需要安装标记或反射器,降低了车间改造成本,缩短了安装和投入使用的时间,提高了车间柔性和设备可移植性,因而能够满足市场对AGV高灵活性、短安装和启动时间的需求。

怡丰自然导航AGV
应用于上汽大众高压电池车间
(图片来源于怡丰机器人官网)
自然导航实现的过程为:首先让装有环境感知传感器的AGV在未知环境中从某一位置出发,根据其移动过程中内部与外部传感器获取的感知信息进行自定位,同时逐渐建立一个连续的环境地图,即SLAM过程。然后,在此地图的基础上可以实现AGV的精确定位与路径规划,完成导航任务。
SLAM技术是自然导航的核心技术,成功实现SLAM是AGV实现自然导航的前提,SLAM过程中地图建立的精度对后期定位与导航的精度有着重大影响。自然导航的SLAM技术有2种,即激光SLAM和视觉SLAM,两者的原理基本相同。激光SLAM利用2D或3D激光雷达扫描周边环境,然后再通过软件构建即时地图;而视觉SLAM则是利用摄像头拍摄的图像来构建地图。
自然导航是目前AGV行业最先进的导航技术之一,也是近几年随着智能制造和柔性生产需求而兴起的导航方式。如今,国内包括新松机器人、嘉腾机器人、怡丰机器人、佳顺智能等厂商都推出了自然导航式AGV产品,并逐渐应用于工厂车间物料运转作业等场景。
② 荧光导航
荧光导航一定意义上可以说是磁导引和色带导引的升级版。荧光导航的工作原理是,荧光导航传感器发射经调制的紫外光,当荧光色带上的荧光物质被紫外光激发,即会发射出波长在可见光光谱范围内(约420 nm 到750 nm)的可见光,荧光导航传感器通过接收此光线,从而测量判断色带与AGV的相对位置,让AGV小车沿既定路线行驶。
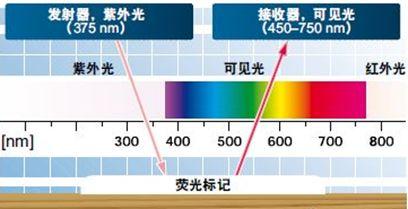
图 荧光导航工作原理
荧光导航兼具磁导引的耐污染能力和色带导引的抗干扰能力,提供更高的精度和集成度,并能优化小车控制。缺点则是与目前主流的磁导引方式相比,荧光导航传感器本体成本略高,但与磁条路线相比,荧光色带将会省去90%的路线成本,因此也能一定程度上削减整体方案成本。该导航技术自推出后即备受关注,也是AGV导航技术创新的方向之一。
此外,声音导航、神经网络导航、路径规划等智能化AGV导航控制技术也都在发展中,并将随着机器人导航技术的进步而进步。
04
更智能更柔性化
AGV导航方式发展展望
01
复合导航成为主流
复合导航指应用两种或两种以上导航导引方式实现AGV运行,其目的是为了适应各种使用场景,也是未来AGV导航的主要发展方向之一。比如,使用惯性导航控制、二维码标签辅助纠偏的惯性二维码复合导航,可提高导航精度及作业效率;使用惯性导航与视觉导航的复合导航方式,则既弥补了惯性导航误差随时间漂移的不足,也弥补了视觉导航处理实时性不足的缺陷等等。
02
视觉导航仍是重要发展方向
虽然,目前受限于现有计算设备的运算速度和存储容量,特别是图像处理速度慢始终难以解决,视觉导航实用性不强;但是,相信随着计算机技术的发展及快速图像处理关键技术的突破,视觉导航将成为具有广阔前景的AGV导航技术之一。
03
无标记自然导航将被更多采用
未来,工业互联网、边缘计算、云计算以及人工智能与智能移动机器人相互交融会越来越普及,将带来AGV行业革命性变化,要求AGV更智能,更柔性化,越来越多的AGV将采用无标记自然导航技术以适应复杂、开放的动态环境。
04
将有更多的导航方式产生
导航导引技术始终是AGV发展的最主要部分,随着市场需求的不断变化,未来还必将有更多的导航技术与方式出现。比如,围绕个人移动终端的室内定位技术发展方兴未艾,基于Wi-Fi、蓝牙的多种方案趋于成熟,并投入市场应用,将这些技术与机器人导航技术相结合,或将为AGV室内导航开辟新的思路。














 粤公网安备 44010602004352号
粤公网安备 44010602004352号