▎ 产品介绍Product Introduce
IMU560系列是瑞芬公司打造的一款GPS/INS组合导航系统,惯性测量单元(IMU)经过全温区精密校准以满足不同环境下的性能需求。多数据Kalman滤波融合算法通过内置导航计算机实现,输出实时准确的载体姿态、航向信息,三维位置和速度信息以及各惯性器件信息。其外观精致,结构小巧,安装方便,使用灵活,操作更加平稳可靠。
▎ 产品定位Product positioning
IMU560系列产品定位为车载/船载通用惯性和组合导航产品,目标市场:
(1) 动中通
(2) 车载导航
(3) 动态姿态测量
▎ 产品特性Product features
陀螺仪零偏不稳定性10°/h (Allan Variance)
加速度计偏差1.7mg(2g量程下)
▎ 应用范围Application
●动中通姿态单元 ●车载导航和测控系统 ●高速列车测控系统
●测绘POS系统 ●船舶和海洋工程 ●海洋和水下测绘 ●飞行控制
▎ 产品性能Specifications
|
指标 |
IMU560 |
单位 |
|
姿态精度 |
||
|
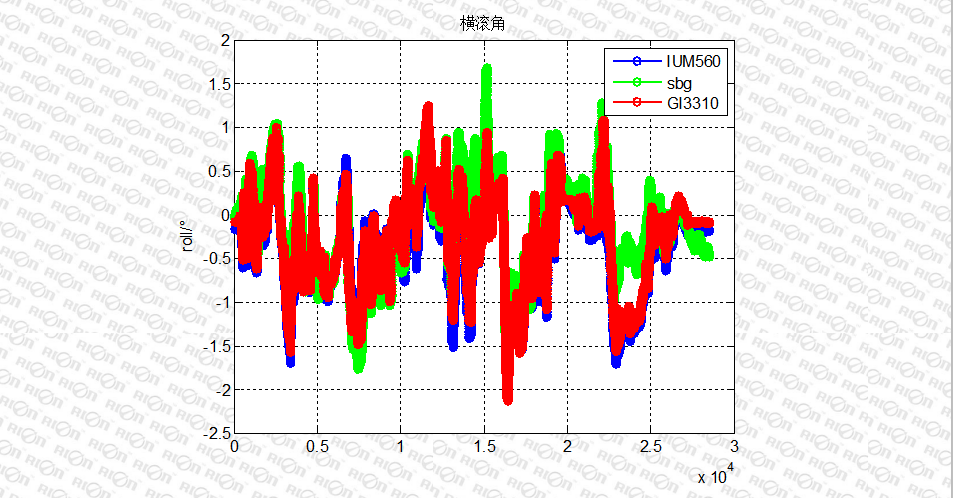
横滚/俯仰 1σ(静态) |
0.1 |
° |
|
横滚/俯仰 1σ(动态) |
0.3 |
° |
|
IMU560 航向位置推算精度 |
||
|
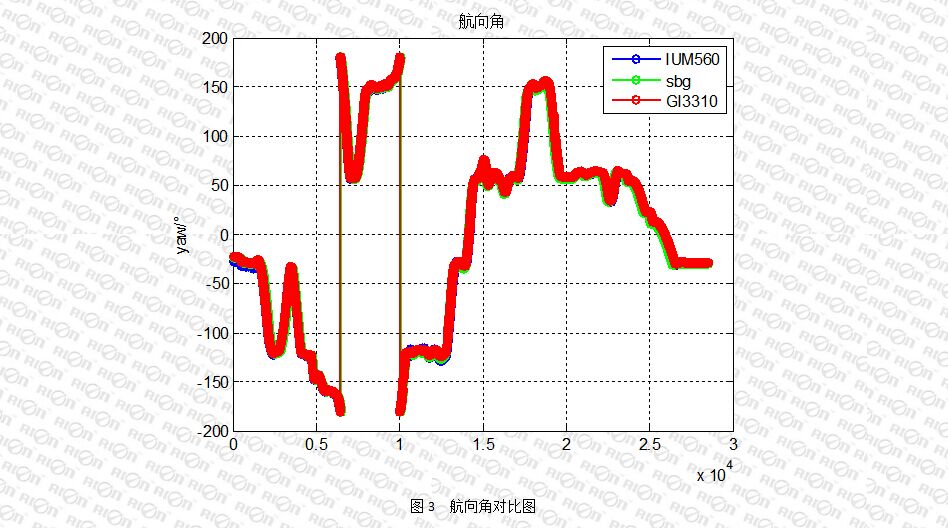
航向精度1σ |
0.3°(GPS有效) |
° |
|
0.5°(GPS失锁5min) |
° |
|
|
纯惯导位置 推算精度1σ |
<40m@1min (GPS失锁) |
m@1min |
|
输出频率 |
1~100 |
Hz |
|
陀螺仪 |
||
|
量程 |
±300 |
°/s |
|
零偏不稳定性(Allan) |
10 |
°/h |
|
零偏稳定性(10s均值) |
15 |
°/h |
|
零偏重复性 |
15 |
°/h |
|
非线性误差 |
<0.1% of FS |
|
|
标度因素非线性1 |
<0.02 |
% |
|
标度因素变化(在25℃) |
±0.3 |
% |
|
分辨率 |
<0.01 |
°/s |
|
加速度灵敏度 |
<0.0028 |
°/s/g,rms |
|
角度随机游走 |
<0.15 |
°/√hr |
|
噪声强度 |
0.014 |
°/s/√hr |
|
带宽 |
200 |
Hz |
|
加速度计 |
||
|
量程 |
±4 |
g |
|
零偏稳定性 |
0.2 |
mg |
|
全温零偏 |
1.7 |
mg |
|
标度因素稳定性 |
<0.1 |
% |
|
分辨率 |
0.1 |
mg |
|
非线性2 |
0.1 |
% |
|
噪声强度 |
200 |
ug/√hr |
|
带宽 |
200 |
Hz |
|
可兼容的卫星模式 |
||
|
GPS L1C/A, SBAS L1C/A, GLONASS L1OF, BEIDOU B1 |
||
|
IMU560 标配GPS参数 |
||
|
启动时间 |
冷启动:29s 热启动:1s |
|
|
灵敏度 |
-166dBm |
|
|
速度 |
0.05m/s |
|
|
方位精度 |
0.3°,P=50%@30m/s |
|
|
水平位置推算精度 |
2m |
|
|
环境特性 |
||
|
抗振动 |
10grms、10~1000Hz |
|
|
抗冲击 |
100g@11ms、三轴向(半正弦波) |
|
|
工作温度 |
-40°C~+85°C |
|
|
电气接口 |
||
|
输入电流 |
<100mA |
|
|
输入电压 |
9-36V(纹波50mV) |
|
|
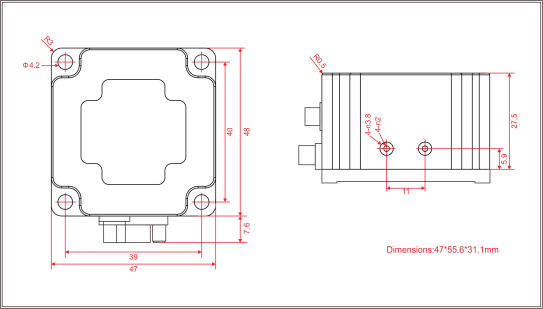
尺寸 |
47*55.6*31.1mm |
|
|
重量 |
85g(不含电缆线) |
|
|
接口类型 |
J30J-9ZKP |
|
*出厂合格测试指标
1. ±100°/s内要求对称性和非线性均<200ppm,测试角速率0,±0.1, ±0.2, ±0.5,±1,±2,±5±n*5, n = 1,2,3…
2. 分别考核±1g内和全量程



具体详细报告请联系客服!

























")
")
")

 粤公网安备 44010602004352号
粤公网安备 44010602004352号