基于视觉的机器人室内定位解决方案
RGB-D视觉SLAM解决方案
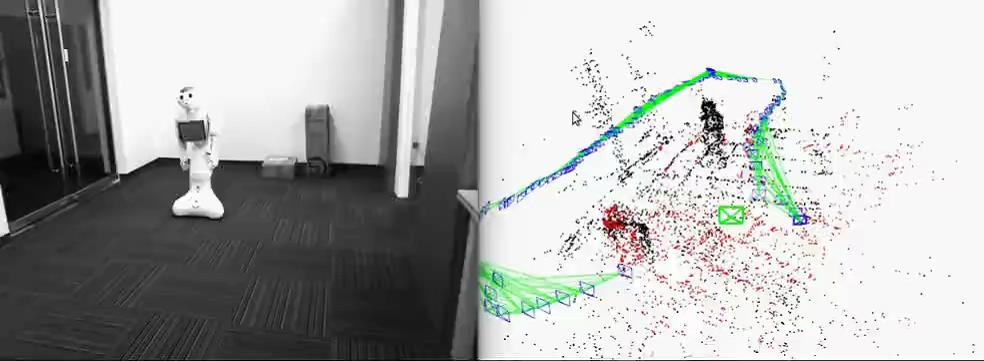
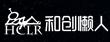
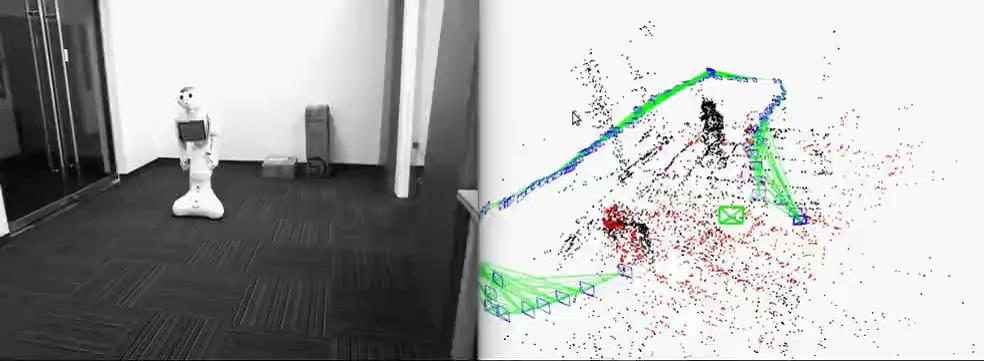
方案概述:利用机器人上的 RGB-D 摄像头在室内游走,拍摄室内环境的图像,通过提取环境里的特征点进行地图的构建。构建地图完成后,机器人可以在室内的任何位置,通过 RGB-D 摄像头所拍摄到的当前画面特征点与地图中的特征点进行比对,从而推断出自己的位置。
方案优势:
相对于市场上常见的激光定位技术的优势。
1. 成本低。
2. 可以检测更多的特征点,位置匹配更精确。
3. 提供视觉信息,方便机器人对环境中物体的识别,认知。
双目摄像头视觉SLAM解决方案
方案概述:
机器人利用双目摄像头获取室内场景的深度信息。通过对室内环境全面扫描构建室内真实三维地图。构图完成后,通过在地图中匹配当前点云信息,推算当前机器人的位置和朝向。
方案优势:
相对于激光定位技术的优势:
1. 环境信息密集,位置认识更加精确。
2. 地图具有更高可读性,方便维护。
3. 提供完整的三位空间信息,对于移动蔽障,路径规划等有更大帮助。

基于视觉SLAM与IMU传感器自主移动解决方案
方案概述:
RGB-D视觉SLAM与双目摄像头视觉SLAM都是单纯基于视觉系统进行构建地图以及定位的。由于机器人通常具备视觉之外的传感器:轮子编码器,电子罗盘,IMU(惯性测量单元)等。本方案是在方案一与方案二的基 础上,融合 IMU(惯性测量单元)传感器信息,优化定位系统的性能。
方案优势:
1. 相对于RGB-D视觉SLAM,双目摄像头视觉SLAM:
2. 融合了 IMU 提供的准确运动信息,定位更加精准。













")

 粤公网安备 44010602004352号
粤公网安备 44010602004352号